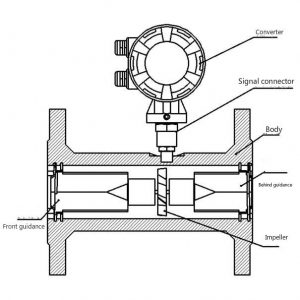
Cuando el líquido medido fluye a través del sensor, el impulsor se ve obligado a girar bajo la acción del fluido, y su velocidad de rotación es proporcional a la velocidad media de la tubería. La rotación periódica del impulsor cambia el valor de magnetorresistencia del circuito magnético, y el flujo magnético en la bobina detectora cambia periódicamente, lo que produce la fuerza electromotriz inductiva con la misma frecuencia que la frecuencia de rotación del impulsor. Tras la amplificación, se convierte y procesa.